винтажная революция. Каким был мотосамокат 100 лет назад / Хабр
Электросамокат стал частым гостем на улицах больших городов. Каждый может снять его на час-другой, чтобы доехать до работы или прокатиться с ветерком. Но это не новое изобретение: на самом деле, бум моторизованных самокатов произошел впервые в США в начале XX века. Задолго до кикшерингов Lime и Bird суфражистки и бизнесмены разъезжали по американским улицам на двухколесном приспособлении с бензиновым двигателем. Этот мотосамокат назывался Autoped.
Собрали короткую историю взлета и падения автопеда.
Оригинальный velocipede
Концепция мотосамокат берет начало в работах немецкого профессора барона Карла фон Дреза из Карлсруэ. В 1817 году он придумал «машину для бега»: самокат, который выглядел как велосипед без педалей.
Затем идея устройства для перемещения при помощи мускульной силы человека разрослась и наплодила и забавные велосипеды-«кенгуру» с огромным передним колесом, и трициклы, а также более похожие на современные велосипеды и самокаты. Через пару десятилетий после изобретения велосипеды стали снабжать ножным приводом. А на рубеже XIX века в США выдали первый патент на электрический велосипед на батарее.
Через пару десятилетий после изобретения велосипеды стали снабжать ножным приводом. А на рубеже XIX века в США выдали первый патент на электрический велосипед на батарее.
Но, конечно, до современных литиевых батарей, которых хватает даже на автомобиль, было далеко. Так что первый массовый моторизованный персональный транспорт приводил в действие бензиновый двигатель.
Патент на AutopedИзобретатель Артур Хьюго Сесил Гибсон подал заявку на патент самодвижущегося транспортного средства в 1913 году. По всей видимости, ему помогал другой изобретатель, Джозеф Ф. Меркель, создатель одноименного мотоцикла. Прототип назывался Motoped, а его финальная версия — Autoped. К производству приступили в 1915 году в Квинсе, в штате Нью-Йорк.
Autoped представлял собой увеличенную версию самоката, на который легко помещался взрослый человек, с четырехтактным двигателем над передним колесом. Двигатель работал на бензине. Рулевая колонка складывалась. По некоторым свидетельствам современников, в теории он мог разгоняться до 55 километров в час. Но рулевая колонка управляла одновременно сцеплением и тормозом, из-за чего уже на 32 километрах в час вести Autoped было неудобно.
Но рулевая колонка управляла одновременно сцеплением и тормозом, из-за чего уже на 32 километрах в час вести Autoped было неудобно.
Мотосамокат весил порядка 60 килограммов и создавал много шума. Зато расходовал топливо экономичнее по сравнению с тем же автомобилем Ford Model T: менее 2 литров на 100 километров против 11–19 литров.
Новая свобода
Современный мобильный транспорт поначалу не воспринимали всерьез. Подумаешь, Segway, на котором туристы катаются. Профессиональная пресса тех дней отнеслась к Autoped с тем же скепсисом, списав его как причуду. Но, в отличие от высокомерных журналистов, публику затея очень даже заинтересовала. Возможно, потому что самоходный самокат продавали как решение реально существующей проблемы навигации в городе. Это личный транспорт, чтобы съездить по делам и добраться до работы. Полезен и коммивояжеру, и врачу, и домохозяйке.
Но Autoped был по карману не всем. Его цена составляла 100 $. Вышеупомянутый Ford Model T стоил 400 $, а средняя зарплата за год была чуть меньше 600 $. То есть, мотосамокат продавался как игрушка для людей с достатком. Создатели самоката это понимали и выпускали соответствующую рекламу, где счастливые обеспеченные люди гордо разъезжали на самокате.
То есть, мотосамокат продавался как игрушка для людей с достатком. Создатели самоката это понимали и выпускали соответствующую рекламу, где счастливые обеспеченные люди гордо разъезжали на самокате.
Несмотря на дороговизну, Autoped полюбили женщины, за новую свободу и мобильность. Так, летчица Амелия Эрхарт попала на множество фото на мотосамокате, причем подпись под одним снимком гласила «Говорят, в скором будущем вообще никто не будет ходить».
Autoped оседлали и европейки: суфражистка леди Флоренс Норман ездила на свою работу в центре Лондона на этом двухколесном приспособлении.
Autoped пробовали приручить для полезной работы. Лучше всего с этим справилась почтовая служба Нью-Йорка, которая раздала мотосамокаты почтальонам — задолго до сегодняшнего бума курьеров. А весь потенциал изобретения раскрыли молодежные банды, покидавшие место преступления на Autoped’ах из-под носа у полицейских. Высокотехнологичные хулиганы терроризировали Квинс, Бруклин и Манхэттен.
Чем закончилось
Интересно, что бензиновые самокаты в начале XX века столкнулись с той же проблемой, что и электрические в XXI веке: сложности с ПДД. Autoped выехал на улицы американских городов за 15 лет до повсеместного появления светофоров. Стандартизированные правила по выдаче водительских лицензий появились в 30-е годы. До этого лихачей мало что сдерживало, к неудовольствию пешеходов. Точно так же электросамокаты сначала появились на улицах городов, а потом обросли правилами.
Но Autoped подкосили не запреты, а отсутствие прибыли. Концепт, обогнавший свое время, не был коммерчески успешен. Историки предполагают, что это связано со сложной нишей, которое занимало устройство. Оно было одновременно значительно дороже велосипеда, но не давало комфорта, который стоило ожидать от транспорта с мотором. В 1921 году мотосамокаты перестали производить.
Его идея не умерла и породила продолжателей. Ни один из них не оставил столь же винтажного следа в истории.
Написано по материалам Смитсоновского музея
Для читателей Хабра — скидка 7% на все покупки в нашем магазине Мэдроботс по промокоду MADHABR. Сезон мобильного транспорта мы еще не успели открыть, ждем апреля. Но сможем порадовать другими гаджетами для весенних поездок и прогулок.
Сезон мобильного транспорта мы еще не успели открыть, ждем апреля. Но сможем порадовать другими гаджетами для весенних поездок и прогулок.
Авто самоделки | Сделай сам своими руками
3 варианта сделать надежную бобышку на конце троса
Авто самоделки / Мастерская
Заделка троса газа, сцепления или тормозов на транспортных средствах в виде бобышки в процессе длительной эксплуатации или при приложении чрезмерной нагрузки может треснуть, потерять форму и выскочить из гнезда. Часто трос ломается под бобышкой или
Как собрать внедорожный и мощный мотосамокат
Электроника / Авто самоделки
Будем использовать раму для скутера, собранную некоторое время назад. Для этого с нее удаляем один из узлов. Растачиваем на самодельном токарном станке центральное отверстие ведомой звездочки и сверлим отверстия под крепеж.
Как сделать мотовелосипед на базе двигателя мотокосы
Авто самоделки
Если на велосипед с педальным приводом поставить мотор, то его возможности расширяются, не придется тратить мускульную энергию, появится возможность преодолевать большие расстояния и экономить время на перемещения. Для оснащения велосипед моторным
Для оснащения велосипед моторным
Почему нельзя верить встроенному индикатору заряда аккумулятора
Авто самоделки
Самый большой миф об этом индикаторе – это то, что он контролирует заряд батареи. Впрочем, в этом есть доля правды, потому что заряд напрямую связан с плотностью электролита. Но если в вопросе необходимости обслуживания аккумулятора ориентироваться
Как сделать любую пластиковую крышку
Авто самоделки / Лайфхаки и полезные советы
Пластиковые крышки могут понадобиться для различных целей: плотно укупоривать емкости, закрывать технологические или конструктивные отверстия в станках, различных механизмах, транспортных средствах и т. д. Сделать их сможет любой взрослый человек
Как надежно утеплить гаражные ворота
Авто самоделки
В холодное время отапливать гараж с неутепленными воротами совершенно бесполезно: все тепло будет уходить через них наружу. Утеплить гаражные ворота совсем нетрудно с помощью утеплителя пеноплекс и листов плит OSB-3 всего за несколько часов. С
С
Как в одиночку завести машину если сел аккумулятор
Авто самоделки
Как завести машину вдали от цивилизации, находясь, например на рыбалке или охоте, если разрядилась аккумуляторная батарея из-за оставленной не выключенной автомагнитолы, подфарников и т. д. или, когда выходит из строя электростартер? Ситуация на
Как обновить любую старую магнитолу установкой Bluetooth
Электроника / Авто самоделки
CD или кассетные автомобильные магнитолы способны прослужить еще очень долго, несмотря на то, что музыкальные носители уже устарели. Чтобы вдохнуть жизнь в старую магнитолу, достаточно установить в нее блютуз-модуль. И наделить устройство новой
Как устранить заклинивание суппорта тормозной системы
Авто самоделки
Если клинит передний суппорт тормозной системы автомобиля, то, возможно, наблюдается дефицит смазочного материала в его направляющих. При их периодической смазке можно избавиться от такой часто встречающейся неисправности тормозной системы
Мотосамокат из велосипеда и двигателя мотокосы
Авто самоделки
Двигатель от мотокосы и запчасти от старого велосипеда могут стать основой для сборки моторизованного самоката. Для этого не нужны особые знания, профессиональный опыт и большие затраты.
Для этого не нужны особые знания, профессиональный опыт и большие затраты.
Как сделать эффективный глушитель на мото двигатель
Авто самоделки
Шум, издаваемый мотоциклетным двигателем на высоких оборотах, особенно двухтактным, очень неприятен для человеческого уха из-за своей резкости и высокой тональности. Но его можно заметно приуменьшить с помощью самодельного глушителя и для этого не
Как сделать электрический самокат
Наши посты содержат партнерские ссылки. Иногда, но не всегда, мы можем заработать $$, когда вы совершаете покупку по этим ссылкам. Без рекламы. Всегда. Узнать больше
Содержание_
- Как сделать электрический скутер за несколько простых шагов
- Вы действительно можете сделать электрический скутер
- Почти закончили со своим самокатом
- Дополнительные советы
- Будьте в безопасности на своем новом электрическом самокате
Вы действительно можете сделать свой собственный лучший электрический скутер.
Задумывались ли вы когда-нибудь, можно ли построить собственный электрический скутер? Это не так сложно, как вы думаете, хотя сначала полезно получить базовый опыт работы своими руками. Вы действительно можете построить крутой скутер своими руками, который позволит вам кататься по окрестностям. Это руководство «Как сделать электрический самокат» поможет. Возможно, это не лучший складной электрический самокат для взрослых, но это весело. Если вы не хотите делать это своими руками, взгляните на обзор складного самоката Urb E.
Бритва E200. Изображение предоставлено: Youtuber Epic Kids Toys Эта статья предназначена для того, чтобы дать вам основные шаги, которые вам понадобятся, чтобы завершить этот проект и иметь под ногами пригодный для использования в дороге моторизованный электронный скутер, когда вы летите по дороге. Важным компонентом, который помогает запустить мощный двигатель, является напряжение. В зависимости от напряжения, это может быть разница между наличием надежного и мощного двигателя или двигателем, у которого недостаточно мощности для правильной работы.
Однако, если вы хотите узнать, как делаются электрические скутеры, мы также предоставим вам информацию. Это низко и грязно. Это не отполированный первоклассный скутер с супер скоростью от известной компании по производству электрических скутеров. Но в итоге вы получите что-то, что может быть даже веселее, чем лучший самокат. Итак, приступим.
Первое, что вам понадобится, это приличная рама. Зачем строить с нуля? Просто возьмите в руки старый самокат. Он также должен иметь достойную подвеску, чтобы сделать вашу езду более плавной. Ищите раму из алюминия, а не из твердого пластика, так как это гарантирует ее прочность и легкость. Кроме того, убедитесь, что вам будет удобно на нем сидеть.
Далее вам нужно найти электрический двигатель постоянного тока, работающий от батареи. Просто убедитесь, что двигатель имеет правильный крутящий момент, который вам понадобится. Я предлагаю двигатель мощностью не менее 50 Вт, поскольку вы хотите, чтобы он приводил вас в движение, но вы не хотите, чтобы транспортное средство двигалось слишком быстро и было опасно. Безопасность прежде всего. Вы также захотите разыскать как минимум четыре 12-вольтовых свинцово-кислотных аккумулятора для питания. Для обоих этих пунктов хорошим местом для начала является магазин электроники.
Безопасность прежде всего. Вы также захотите разыскать как минимум четыре 12-вольтовых свинцово-кислотных аккумулятора для питания. Для обоих этих пунктов хорошим местом для начала является магазин электроники.
Зарядное устройство играет решающую роль в поддержании нормальной работы аккумулятора вашего электроскутера. Когда у вас есть зарядное устройство и аккумуляторы, важно убедиться, что напряжение аккумулятора соответствует требованиям вашего электроскутера.
Другие предметы, которые вам понадобятся, включают контроллер питания постоянного тока, велосипедную цепь, инструмент для велосипедной цепи, рычажный переключатель и несколько проводов.
Вы действительно можете сделать электрический скутер
Теперь мы переходим к сути этого проекта. Следующим шагом является поиск коленчатого вала двигателя. Это металлический цилиндр, который торчит из двигателя. Когда двигатель работает, эта часть вращается. Вам нужно будет прикрепить звездочку к коленчатому валу с помощью болта, а затем прикрепить еще одну к оси заднего колеса скутера.
Далее двигатель будет прикреплен к деке электронного скутера. Вы можете использовать несколько прочных ремней, либо прикрутив их к палубе, либо используя прочный клей, если они надежны. Просто убедитесь, что обе звездочки совпадают. С двигателем, закрепленным под вашим контролем и надежно заземленным. Вам нужно будет подключить аккумулятор к двигателю, убедившись, что он правильно изолирован и закреплен.
Теперь двигатель нужно подключить к заднему колесу скутера. Вы собираетесь использовать велосипедную цепь, которая соединит звездочку двигателя со звездочкой на колесе. Если цепь слишком большая, вы можете использовать универсальный инструмент для ее укорачивания. В некоторых случаях вам может понадобиться модифицировать кожух вокруг колеса самоката, чтобы цепь могла свободно двигаться. Имейте в виду, что бензиновые скутеры тоже существуют, если вы колеблетесь в отношении электрических.
Тем не менее, вы можете найти отличную модель для начинающих в нашем обзоре электрического скутера Hiboy S2.
Самокат почти готов
Мы почти завершили шаги, необходимые для того, чтобы научиться делать электрический самокат. Теперь нам просто нужно подключить переключатель, который будет включать и выключать двигатель. Для этого вам нужно будет использовать контроллер питания. Просто подключите двигатель к контроллеру мощности и подключите контроллер к выключателю. Рычажный переключатель – лучший выбор. Вы можете проложить проводку по рулю скутера, удерживая ее на месте с помощью стяжек-молний. Затем закрепите переключатель на руле, и теперь вы можете запускать и останавливать двигатель.
Ваш электросамокат готов к поездке.
Оснащенный защитным снаряжением, таким как шлем и наколенники, вы можете уверенно путешествовать по улицам на максимальной скорости. Кроме того, если это возможно, ездите по специально отведенным велодорожкам, чтобы снизить вероятность несчастных случаев и повысить безопасность.
Razor E300S Изображение предоставлено: Youtuber Street ScooterДополнительные советы
быть сделано. Возможно, вам придется снять корпус рядом с колесом и т. д. Это не точная наука. И это часть удовольствия. Это что-то вроде электрического мопеда, но лучше старомодного велосипеда. Как только вы закончите делать самокат, ознакомьтесь с нашей статьей о советах по обкатке электрического самоката. Кроме того, не забывайте, что вы также можете приобрести аксессуары для своего скутера; у нас есть отличный список лучших держателей телефона для электрических скутеров, которые вы можете проверить. Вы также можете прочитать нашу страницу о том, как работает электрический дроссель на скутере, чтобы узнать больше о работе скутеров.
Возможно, вам придется снять корпус рядом с колесом и т. д. Это не точная наука. И это часть удовольствия. Это что-то вроде электрического мопеда, но лучше старомодного велосипеда. Как только вы закончите делать самокат, ознакомьтесь с нашей статьей о советах по обкатке электрического самоката. Кроме того, не забывайте, что вы также можете приобрести аксессуары для своего скутера; у нас есть отличный список лучших держателей телефона для электрических скутеров, которые вы можете проверить. Вы также можете прочитать нашу страницу о том, как работает электрический дроссель на скутере, чтобы узнать больше о работе скутеров.
Будьте в безопасности на своем новом электроскутере
Всегда будьте в безопасности. Этот электрический самокат для взрослых остановится только тогда, когда вы отключите электродвигатель. Поэтому рекомендуется убедиться, что у вас есть ручные тормоза, чтобы вы могли снизить скорость на несколько миль в час, прежде чем нажать на переключатель. Возможно, это не самый быстрый электрический скутер, но все же лучше перестраховаться. Торможение должно быть минимальным, чтобы не разрядить аккумулятор, удерживая тормоз слишком долго. При правильном управлении тормозом тормоза электрического скутера можно отрегулировать в соответствии с предпочтениями пользователя, особенно в зависимости от типа грунта, и обеспечить безопасность и эффективность каждого тормоза.
Торможение должно быть минимальным, чтобы не разрядить аккумулятор, удерживая тормоз слишком долго. При правильном управлении тормозом тормоза электрического скутера можно отрегулировать в соответствии с предпочтениями пользователя, особенно в зависимости от типа грунта, и обеспечить безопасность и эффективность каждого тормоза.
Теперь, когда вы знаете, как сделать электрический скутер, всегда надевайте шлем, а с этой сборкой, возможно, держитесь тротуаров и держитесь подальше от дороги. Это может быть не скутер для ежедневных поездок на работу, но удовольствие от создания таких электромобилей. Вместо того, чтобы использовать его для поездок на работу, его, вероятно, лучше использовать для коротких поездок. И дети должны покататься на одном из этих профессиональных мотороллеров. Razor Pocket Mod — хороший выбор. В качестве альтернативы, если вы предпочитаете просто купить готовый скутер, вы можете ознакомиться с нашим списком лучших электрических скутеров для студентов, которые помогут вам передвигаться по кампусу, или с лучшими электрическими скутерами с двумя двигателями для большей мощности.
Собери электрический скутер своими руками
» Перейти к дополнительным материалам
С наплывом электрических скейтбордов и самокатов, которые заполонили практически каждый город, я начал думать, что, может быть, стоит купить что-нибудь для себя. В настоящее время очень доступно купить скутер, такой как версия Xiaomi Mi, примерно за 400 долларов, а также множество стартапов с потрясающим дизайном. Вместо этого я решил, что попытаюсь создать свой собственный с нуля. Не столько для того, чтобы сэкономить деньги, сколько для того, чтобы получить опыт создания чего-то своего.
РИСУНОК 1. Самокат в сборе.
Этот проект начался в начале лета 2019 года, когда у меня появилась идея, и продолжался шесть месяцев, когда я закончил всю электронику и код. Хотя это был очень трудоемкий проект, мне нравилась каждая секунда процесса, и я с удовольствием показывал людям этот проект. Все, что мне сейчас нужно, это шлем!
Основная цель этой статьи — показать мой дизайн и производственный процесс, чтобы вы могли узнать из того, что я создал. Я постарался предоставить как можно больше информации о моем дизайне в максимально сжатой форме.
Я постарался предоставить как можно больше информации о моем дизайне в максимально сжатой форме.
Физическая конструкция
Создание электрического скутера начинается с двух ключевых компонентов: рамы скутера и двигателя. Существует два основных типа моторных приводов для самокатов: ременный/редукторный привод или прямой привод, например мотор-втулка. Я выбрал бесщеточный ступичный двигатель, который был разработан для использования на стандартном ховерборде. Основная причина, по которой я выбрал этот двигатель, заключается в его непревзойденном соотношении мощности и стоимости. Поскольку ховерборды производились массово, стоимость двигателя была на порядки меньше, чем я мог найти где угодно.
Кроме того, было относительно просто разработать крепление, которое могло бы удерживать двигатель на поворотной оси. Я хотел, чтобы двигатель был впереди, чтобы задний дисковый тормоз с ручным управлением работал. Этот ручной тормоз чрезвычайно важен для электрического скутера в районе с большими холмами и опасным движением.
Самой большой механической проблемой, которую необходимо было решить, была конструкция колесной арки. Поскольку я решил использовать двигатель-втулку, крепление двигателя должно было выдерживать вес пользователя в дополнение к крутящему моменту двигателя, ускоряющегося и вращающегося. При покупке скутер имел слабое колесо в сборе, которое было нелегко модифицировать для поддержки моторизованного колеса. На рис. 2 показано, как колесо в сборе вырезается из шестигранного профиля.
РИСУНОК 2. Колесо OEM , разрезаемое ленточной пилой.
Затем я использовал большой кусок алюминия и сконструировал раму, на которой держится двигатель. Он зажимается четырьмя крепежными болтами и небольшим штоком со сквозными отверстиями. Я использовал Autodesk Inventor для создания детали (которая включена в файлы для загрузки).
Эта конструкция состоит из двух частей: основной Г-образной части, которая соединяет привод руля с двигателем, и другой части, которая крепит двигатель к основанию четырьмя болтами 10-32. Я смог использовать CAM в Fusion 360 и станок с ЧПУ, чтобы сделать основную деталь, с дополнительным ручным фрезерованием и нарезанием резьбы для окончательной обработки.
Я смог использовать CAM в Fusion 360 и станок с ЧПУ, чтобы сделать основную деталь, с дополнительным ручным фрезерованием и нарезанием резьбы для окончательной обработки.
Наконец, я использовал ручную фрезу, чтобы вырезать базовый зажим и добавил сквозные отверстия для болтов. На рисунках 3-6 показана CAD-модель узла колеса в дополнение к процессу сборки колеса. В основании скутера есть две направляющие, поддерживающие вес водителя, которые я также использовал для надежного удержания двух аккумуляторов LiPo. Так как батареи LiPo очень нестабильны и подвержены как повреждению водой, так и проколу, я добавил металлическую крышку, чтобы защитить батареи от каждого из этих факторов.
РИСУНОК 3. CAD сборки колеса с ЧПУ.
РИСУНОК 4. Готовый узел колеса с ЧПУ с присоединенным шестигранником.
РИСУНОК 5. Крупный план крепления двигателя.
РИСУНОК 6. Окончательная сборка переднего колеса.
Окончательная сборка переднего колеса.
Для этого я отрезал кусок алюминия толщиной 1/16 дюйма и согнул его по длине с помощью гибочного станка и ацетиленовой горелки, чтобы уменьшить нагрузку на металл при гибке. При нормальном использовании дно может поцарапаться (см.0074 Рисунок 7 ), но металлическая крышка пока без проблем принимает на себя все повреждения.
РИСУНОК 7. Крупный план металлического каркаса, защищающего батареи.
Я широко использовал 3D-печать как на стадии прототипа, так и в конечном продукте. Наиболее очевидной частью является электрическая коробка, с помощью которой пользователь может легко заряжать аккумуляторы LiPo. В этом блоке есть главный выключатель питания, делитель напряжения для Arduino для считывания напряжения батареи (поскольку максимальное аналоговое напряжение составляет 5 В, а контроллер работает от 12 В LiPo) и разъемы для зарядки LiPo.
Чтобы зарядить этот скутер, пользователь снимает переднюю панель (прикрепленную винтами M3), отсоединяет разъемы XT-60 от основного питания и просто подключает их к зарядному устройству LiPo. Кроме того, корпус ЖК-экрана, корпус Arduino Nano, механизм складывания и гидроизоляционные элементы разработаны и напечатаны для этого самоката на 3D-принтере. Все файлы САПР доступны для загрузки для использования в вашем собственном скутере.
Кроме того, корпус ЖК-экрана, корпус Arduino Nano, механизм складывания и гидроизоляционные элементы разработаны и напечатаны для этого самоката на 3D-принтере. Все файлы САПР доступны для загрузки для использования в вашем собственном скутере.
На рис. 8 выделена электрическая коробка и контроллер, подключенные к раме скутера. Чтобы прикрепить контроллер, я просверлил и нарезал два отверстия в раме и прикрутил контроллер двумя болтами 10-32. Электрическая коробка была соединена с помощью одного болта и стяжки.
РИСУНОК 8. CAD рамы скутера с контроллером и электрической коробкой.
Этот метод крепления работает очень хорошо, обе коробки надежно закреплены. Я не хотел слишком сильно уменьшать прочность самоката, поэтому я выбрал как можно меньше отверстий в самокате.
Позже в сборке я заметил, что ездить на скутере может быть очень неудобно, так как обе мои ноги не могут удобно разместиться на маленькой платформе. Вероятно, это связано с тем, что инженеры спроектировали самокат таким образом, чтобы пользователь ставил одну ногу на раму, а другой толкал самокат вперед. Чтобы исправить это, я знал, что у меня есть два варианта: добавить металлическую пластину сверху или отрезать основную раму и приварить новую.
Вероятно, это связано с тем, что инженеры спроектировали самокат таким образом, чтобы пользователь ставил одну ногу на раму, а другой толкал самокат вперед. Чтобы исправить это, я знал, что у меня есть два варианта: добавить металлическую пластину сверху или отрезать основную раму и приварить новую.
К сожалению, у меня не было доступа к сварочному аппарату, поэтому пришлось использовать первый вариант. Мне удалось найти четвертьдюймовую алюминиевую пластину, которая была достаточно большой, чтобы покрыть платформу. Я использовал ленточнопильный станок и шлифовальный станок, чтобы отрезать пластину по длине, а также добавил прорезь для механизма складывания, как показано на рис. 9 .
РИСУНОК 9. Самокат с дополнительной платформой для стояния.
Последней крупной модификацией этого самоката стал руль. Рули, которые поставлялись со скутером, были так близко друг к другу, что им было очень неустойчиво и трудно управлять, особенно на высокой скорости. Чтобы исправить это, я купил алюминиевую ложу диаметром один дюйм и использовал токарный станок, чтобы уменьшить диаметр, пока она не вошла в раму.
Чтобы исправить это, я купил алюминиевую ложу диаметром один дюйм и использовал токарный станок, чтобы уменьшить диаметр, пока она не вошла в раму.
Наконец, я просверлил и нарезал два отверстия для 10-32 крепежных винтов, чтобы закрепить новый стержень на исходной раме. С более длинным рулем на скутере было намного удобнее ездить, и он чувствовал себя более устойчивым на поворотах.
Одной из ключевых тем, которые я преследовал во всех разработанных мной компонентах, было обеспечение водонепроницаемости всей системы. Хотя было бы неразумно ездить на нем в сильный дождь, вся основная электроника должна быть водонепроницаемой. Основная проблема с водой — это аккумуляторы, которые находятся под скутером.
Чтобы заключить аккумуляторы, как упоминалось ранее, я согнул алюминиевый лист для защиты ходовой части, а также распечатал на 3D-принтере детали с прорезями для кабельных вводов и защитой проводов, чтобы позволить проводам проходить сквозь них. Есть три разных слота для прохождения кабеля, как показано на Рис. 10 : основной источник питания; управление батареями LiPo; и датчики температуры аккумулятора. Эти пазы снабжены нейлоновыми кабельными вводами, которые водонепроницаемы и очень просты в использовании.
10 : основной источник питания; управление батареями LiPo; и датчики температуры аккумулятора. Эти пазы снабжены нейлоновыми кабельными вводами, которые водонепроницаемы и очень просты в использовании.
РИСУНОК 10. Фотография готовой ходовой части скутера.
Наконец, я использовал Dynaflex 230 для полной гидроизоляции батарей, которые видны по краям на Рисунок 10 . Затем эти провода проходят к основной электрической коробке, в которой используются те же кабельные сальники, что и в электрической коробке, и они герметизируются с помощью термоусадочной трубки. Наконец, каждое проводное соединение имеет больше кремния в каждом соединении, чтобы гарантировать отсутствие утечек.
Электрические компоненты
После того, как я выбрал колесо для ховерборда в качестве двигателя, я выбрал контроллер Рисунок 11 , потому что он работал с моим бесколлекторным двигателем и был очень недорогим. Батареи было немного сложнее подобрать.
Батареи было немного сложнее подобрать.
РИСУНОК 11. Крупный план контроллера, установленного на самокате.
Поскольку почти во всех скутерах и велосипедах используются литий-ионные аккумуляторы, я подумал, что они будут лучшим вариантом для меня. Причина, по которой они так широко используются, заключается в их превосходной емкости хранения, зарядных характеристиках, и они могут быть разработаны практически для любого форм-фактора.
Несмотря на то, что я тщательно изучил конструкцию рюкзака для своего скутера, я понял, что у меня нет средств на покупку аппарата для точечной сварки, который используется при сборке этих рюкзаков. В будущем я был бы заинтересован в создании другого скутера или аналогичного проекта, в котором я использую батареи 18650 вместо стандартных батарей LiPo, используемых в этой сборке.
Чтобы найти допустимые размеры для моих аккумуляторов, я провел ряд измерений с помощью штангенциркуля и сделал очень простую модель с помощью Autodesk Inventor, как показано на рисунке 9. 0074 Рисунок 12 . Имея в руках эти размеры, я смог подобрать аккумуляторы, чтобы они подходили под основную раму скутера.
0074 Рисунок 12 . Имея в руках эти размеры, я смог подобрать аккумуляторы, чтобы они подходили под основную раму скутера.
РИСУНОК 12. Простая САПР скутера с аккумулятором (оранжевый).
У меня было 43 мм для ширины батарей, с немного большим пространством, чтобы батареи поместились, не ударяясь о землю. Выбранные батареи были 6S и имели время автономной работы 4000 мАч, что немного меньше, чем я надеялся.
В целом, основная электрическая схема этого скутера была довольно проста в разработке. Как показано на рисунке 13 , у меня есть две батареи LiPo, соединенные последовательно, которые питают контроллер и двигатель. Контроллер считывает показания потенциометра дроссельной заслонки, установленного на руле, для установки скорости двигателя. Кроме того, я добавил кнопку круиз-контроля, также установленную на руле рядом с тормозом. Двигатель управляется трехфазным питанием с тремя датчиками Холла, которые все выводят на контроллер.
РИСУНОК 13. Схема силового привода скутера.
Теперь, когда у меня была основная конструкция скутера, казалось, что его очень легко подключить и ездить. Этого, к сожалению, не было. Подключить батареи и датчики температуры оказалось на удивление сложно, чтобы разместить их в отведенном мне пространстве.
На этом этапе процесса сборки я завершил проектирование ходовой части и электрической коробки, которая была установлена, как вы можете видеть в окончательном проекте еще в Рисунок 1 . Я начал с размещения своих датчиков температуры с лишним кабелем через сальниковые соединения в основании, в дополнение к зарядным кабелям LiPo (всего 26 кабелей).
Наконец, я взял два разъема XT-60 и проложил кабели к блоку управления. Эту процедуру подключения можно увидеть на рис. 14 , на котором показана первоначальная прокладка кабеля в секцию батареи.
РИСУНОК 14. Подключение аккумуляторов к основанию рамы.
Затем я поместил LiPo аккумуляторы в раму, которая плотно прилегает, и начал подсоединять различные разъемы. После значительных проблем с размещением батарей и разъемов в отведенной комнате я понял, что мне нужно что-то изменить, чтобы все поместилось, не оказывая значительного давления на кабели.
Я заметил, что разъемы XT-60 занимают много места, поэтому я решил их убрать и сделать прямые паяные соединения. Я бы не рекомендовал удалять разъемы, но их было проще удалить, чем переделывать корпус.
Я отсоединял каждый из разъемов по одному кабелю за раз, стараясь не допустить короткого замыкания. Я использовал обширную термоусадочную трубку и изоленту, чтобы убедиться, что они хорошо изолированы. Как показано на рис. 15 , вся проводка на основании была проложена и приклеена к термоусадочной трубке.
РИСУНОК 15. Последний блок батарей перед термоусадочной пленкой.
Затем я поместил заклеенную систему в термоусадочную трубку и медленно сжал всю систему, пока она не стала похожа на 9. 0074 Рисунок 16 . После этого я в последний раз надел металлический лист и затянул все болты локтайтом, чтобы сделать их постоянными.
0074 Рисунок 16 . После этого я в последний раз надел металлический лист и затянул все болты локтайтом, чтобы сделать их постоянными.
РИСУНОК 16. Термоусадочные батареи.
Как кратко обсуждалось ранее, я разработал электрическую коробку, которая находится рядом с контроллером двигателя. Схема этого простого блока показана на рис. 17 .
РИСУНОК 17. Схема электрической коробки .
Чтобы зарядить каждую из батарей, я просто вынимаю вилки из блока управления и подключаю их к балансировочному зарядному устройству вместе с соответствующими балансировочными кабелями. Как упоминалось ранее, я хотел бы использовать литий-ионный аккумулятор, который сделал бы процесс зарядки намного проще и плавнее. Поскольку у меня было только одно зарядное устройство, мне пришлось заряжать каждую батарею отдельно.
При использовании скутера я подключаю разъемы аккумулятора к розеткам, которые соединяют аккумуляторы последовательно. В моей первой конструкции у меня был стандартный кулисный переключатель, который был рассчитан на 10 А при 125 В переменного тока, что было значительно ниже моего энергопотребления (около 250 Вт против 125 Вт). Эти переключатели на самом деле предназначены только для переключения переменного тока, что намного проще сделать.
В моей первой конструкции у меня был стандартный кулисный переключатель, который был рассчитан на 10 А при 125 В переменного тока, что было значительно ниже моего энергопотребления (около 250 Вт против 125 Вт). Эти переключатели на самом деле предназначены только для переключения переменного тока, что намного проще сделать.
К сожалению, за несколько дней использования переключатель полностью сгорел. После долгих исследований я обнаружил, что любой переключатель постоянного тока будет слишком большим, чтобы поместиться внутри или рядом с блоком управления. Вместо этого я выбрал импровизированный переключатель с закороченным гнездовым разъемом XT-60, который использовался для замыкания или размыкания цепи. Хотя это, безусловно, не самый чистый вариант переключения, он очень функционален и до сих пор не вызывал проблем.
Оттуда я подключил контроллер к электрической коробке и двигателю, оставив достаточно свободного места для вращения колеса. На этом движение скутера было завершено. Пришло время спроектировать ЖК-экран и сопутствующие датчики. Функциональность, которую я искал на своем ЖК-экране, заключалась в том, чтобы показывать напряжение батареи, приблизительный процент оставшегося заряда батареи, скорость и пройденные мили. Самым сложным из них было заставить работать измерение скорости.
Пришло время спроектировать ЖК-экран и сопутствующие датчики. Функциональность, которую я искал на своем ЖК-экране, заключалась в том, чтобы показывать напряжение батареи, приблизительный процент оставшегося заряда батареи, скорость и пройденные мили. Самым сложным из них было заставить работать измерение скорости.
Чтобы сделать это, я думал использовать датчики Холла, которые использует контроллер, но я беспокоился, что это может помешать основному управлению. Вместо этого я решил использовать показания датчика Холла, когда неодимовый магнит, подключенный к колесу, проходил мимо датчика. Одна проблема с этой конструкцией заключается в том, насколько близко открытая электроника находилась к колесу, из-за чего вода могла разбрызгиваться.
Я разработал простую форму, в которую поместил электронику и эпоксидную смолу под названием Dragon Skin 20, как показано на рисунке 9.0074 Рисунок 18 .
РИСУНОК 18. Водонепроницаемый датчик Холла.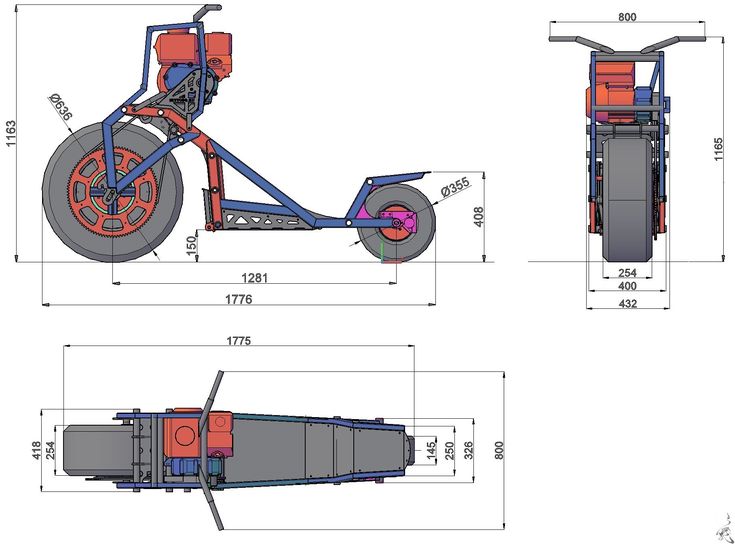
Я оставил эпоксидную смолу на модуле синего цвета, что позволяет мне настраивать чувствительность датчика. На рис. 19 показан корпус экрана, предназначенный для размещения ЖК-экрана 20×4 символов и соединяющийся с рулем с помощью винтов.
РИСУНОК 19. Модель CAD корпуса ЖК-экрана.
Кроме того, я сделал простую коробку для Arduino Nano и связанной с ней проводки ( Рисунок 20 ). И в корпусе корпуса, и в корпусе экрана использовалось стандартное оборудование M3, включая нагревательные вставки, которые вплавлялись в детали с помощью паяльника.
РИСУНОК 20. CAD небольшого электрического блока для Arduino Nano.
Наконец, я припаял все коннекторы к Nano и разместил микроконтроллер на небольшой макетной плате. Затем я добавил гнездовые разъемы вокруг Arduino с шестью разъемами питания и шестью разъемами заземления сбоку. Рисунок 21 показывает прототип коробки, подключаемый к тесту.
РИСУНОК 21. Прототип коробки Arduino Nano.
Я использовал обжимные соединения для подключения каждого устройства к макетной плате на тот случай, если в будущем возникнут проблемы с проводкой. Чтобы измерить напряжение батареи, я добавил делитель напряжения в электрическую коробку с резисторами 47 кОм и 4,7 кОм последовательно с Arduino, подключенным к резистору 4,7 кОм. Назначение делителя связано с тем, что Arduino работает от 5 В и, таким образом, может измерять максимум 5 В. Схема делит напряжение батареи почти точно на 10, что делает его читаемым для Arduino. Схема Nano показана на Рисунок 22 .
РИСУНОК 22. Общая схема Arduino, датчиков и ЖК-экрана.
Программирование
Код для Arduino включен в файлы для загрузки. Я продолжу и объясню методы, которые я использовал при программировании этой системы. Самой сложной частью этой программы было заставить одометр и спидометр датчика Холла работать правильно с ограниченной тактовой частотой. Чтобы прочитать датчик Холла, я подключил выход ко второму цифровому выводу, который может запускать аппаратные прерывания.
Чтобы прочитать датчик Холла, я подключил выход ко второму цифровому выводу, который может запускать аппаратные прерывания.
При каждом нарастающем фронте сигнала датчика Холла запускается прерывание и выполняется простая функция, показанная на рис. 23 .
РИСУНОК 23. Функция увеличения аппаратного прерывания.
Эта функция увеличивает счетчик, который хранится в электрически стираемой программируемой постоянной памяти (ЭСППЗУ). EEPROM — это энергонезависимая память, что означает, что она стабильна, когда устройство не запитано. Доступ к этой памяти не так прост, как определение переменной в памяти; вам нужно отправить байт данных на определенный адрес памяти. К сожалению, поскольку Arduino использует восьмибитную архитектуру, система не сможет хранить показания одометра по одному адресу памяти. Чтобы решить эту проблему, я создал несколько базовых вспомогательных функций, которые записывают и считывают «длинную» переменную по четырем восьмибитным адресам памяти, как показано на рис. 0074 Рисунок 24 .
0074 Рисунок 24 .
РИСУНОК 24. Вспомогательная функция для записи в EEPROM.
Чтобы прочитать значение из памяти, я использовал оператор сдвига битов после чтения четырех байтов из памяти, как показано на рис. 25 .
РИСУНОК 25. Метод побитового преобразования 4x восьмибитного целого числа в «длинную» переменную.
Часть этой программы, связанная со спидометром, запущена TimerOne , который представляет собой 16-разрядный таймер, работающий на частоте 16 МГц. Я устанавливаю период таймера, чтобы запускать событие каждую четверть секунды, чтобы считать показания одометра, сравнить их с предыдущими показаниями, а затем рассчитать скорость.
Программа вычисляет скорость путем преобразования изменения числа оборотов в расстояние. Я сделал массив из четырех самых последних скоростей и вывел среднее значение, чтобы сгладить данные для ЖК-экрана.
Датчики температуры было очень легко настроить с помощью технического описания и базового аналогового считывателя , как показано на рис. 26 .
26 .
РИСУНОК 26. Чтение температуры батареи.
Кроме того, я считываю напряжение батареи очень похожим методом, но умножаю на 10 из-за схемы делителя напряжения. См. Рисунок 27 .
РИСУНОК 27. Показание напряжения LiPo.
Окончательная настройка заключалась в объединении всего этого в одну программу и интеграции ее с ЖК-дисплеем.
Использование этого ЖК-экрана очень просто благодаря прилагаемым библиотекам. Мне пришлось провести несколько тестов на ЖК-дисплее, чтобы убедиться, что расположение пробега, скорости, температуры и напряжения не перекрываются и выглядят хорошо, как показано на рис. 28 .
РИСУНОК 28. Рабочий ЖК-экран.
Заключение
В целом, этот проект был очень познавательным. Было интересно спроектировать весь блок, от механических компонентов до используемого аппаратного и программного обеспечения. Конечный продукт обладает удивительной силой; он может поднять меня с рюкзаком на любой холм, который может предложить Итака, штат Нью-Йорк. Меня порадовала и впечатлила мощность мотора-втулки.
Конечный продукт обладает удивительной силой; он может поднять меня с рюкзаком на любой холм, который может предложить Итака, штат Нью-Йорк. Меня порадовала и впечатлила мощность мотора-втулки.
Кроме того, ЖК-экран очень быстро реагирует и точно показывает скорость и одометр. Хотя мне не удалось проверить запас хода на ровной дороге, я оцениваю его примерно в 6-8 миль без подзарядки, основываясь на предыдущих поездках. Это ниже, чем у многих скутеров на рынке, но я работал с очень ограниченным пространством под скутером и батареями LiPo.
Я бы порекомендовал построить что-то подобное всем, у кого есть время. Я записал большую часть времени, которое я потратил на это, и в общей сложности около 100 часов!
В идеальном мире я бы приварил новую раму к существующему самокату. Это дало бы мне дополнительное пространство, чтобы удобно стоять и разместить всю электронику в большем пространстве.
В будущем я хотел бы немного поэкспериментировать с созданием литий-ионного аккумулятора для питания скутера.